A new formula from Army scientists is leading to new insights on how to build an energy-efficient legged teammate for dismounted warfighters.
In a recent peer-reviewed PLOSE One paper, the U.S. Army Combat Capabilities Development Command, known as DEVCOM, Army Research Laboratory’s Alexander Kott, Sean Gart, and Jason Pusey offered new insights on how to build autonomous legged robots that operate as efficiently as any other ground mobile systems.
Its use could lead to potentially important changes to Army vehicle development. Scientists said they may not know exactly why legged, wheeled, and tracked systems fit the same curve yet, but they are convinced their findings drive further inquiry.
“If vehicle developers find a certain design would require more power than is currently possible given a variety of real-world constraints, the new formula could point to specific needs for improved power transmission and generation, or to rethink the mass and speed requirements of the vehicle,” Gart said.
Inspired by 1980s formula
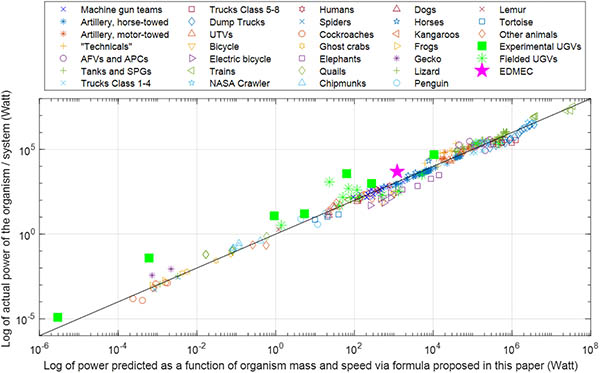
Inspired by a 1980s formula that shows relationships between the mass, speed and power expenditure of animals, the team developed a new formula that applied to a very broad range of legged, wheeled and tracked systems – such as motor vehicles and mobile robots.
Although much of the data has been available for 30 years, the team said it is the first to actually assemble it and study the relationships that emerge from this data. The findings show that legged systems are as efficient as wheeled and tracked platforms.
“In the world of unmanned combat aerial vehicle and intelligent munitions, there is a growing role for dismounted infantry that can advance, often for multiple days, and attack in the most cluttered terrain such as mountains, dense forests and urban environments,” said Kott, who serves as the laboratory’s chief scientist. “That’s because such terrain provides the greatest cover and concealment against the unmanned aerial vehicles.”
“That, in turn, demands that dismounted infantry should be assisted by vehicles capable of moving easily in such a broken terrain,” he added. “Legged vehicles—possibly autonomous—would be very helpful.”
Saving energy for soldiers
One of the problems with legged robots, Kott said, is they seem to have poor energy efficiency, which limits teaming with soldiers in austere battlefields.
“For the past 30 years, U.S. military scientists have addressed a number of challenges in developing autonomous vehicles,” said Kott. “Ground vehicles that maneuver on wheels or tracks, and air vehicles that resemble small airplanes, which we call fixed-wing, and small helicopters, which are rotary-wing, are now quieter and easier to integrate in troop formations. But for legged platforms, many hurdles remain elusive, and a huge one is making them energy-efficient.”
Soldiers cannot afford to carry fuel or batteries for “energy-thirsty legged robots,” he said.
The paper explores whether artificial ground-mobile systems exhibit a consistent trend among mass, power, and speed.
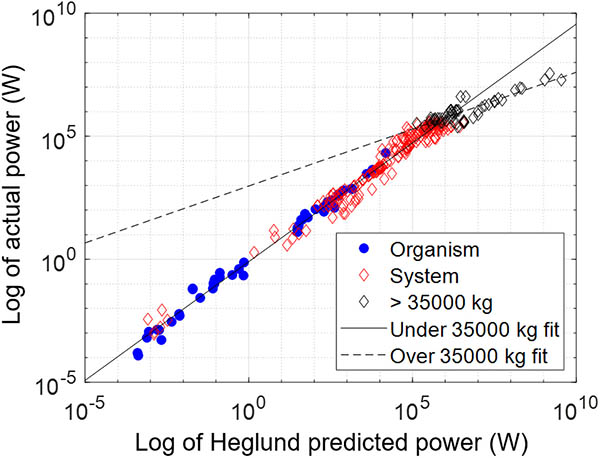
As a starting point, the team investigated a scaling formula proposed in the 1980s for estimating the mechanical power expended by an animal of a given mass to move at a given speed. It compared this with a range of systems varying in size, weight, and power that are autonomous or driven by humans.
The team found the answer to their research question: a similar, consistent relationship does in fact apply also to ground-mobile systems including vehicles of different types over a broad range of their masses.
Kott said this relationship surprisingly turned out to be essentially the same for legged, wheeled, and tracked systems. These findings suggest that human-made legged platforms should be as efficient as wheeled and tracked platforms, he said.
To conduct this study, the researchers collected diverse ground mobile system data from a literature review of previous studies and published data sets. They studied wide ranges of sizes and morphologies within a data set that included, for example, a 17th century British canon, the Ford Model T, the M1 Abrams tank, and an ACELA train.
Determining design tradeoffs
Gart said the research is relevant to designing ground mobile systems because it helps designers determine tradeoffs among power, speed, and mass for future terrestrial robots for defense applications.
One Army goal is to develop new types of autonomous, or partly autonomous, ground vehicle to deliver supplies to soldiers in challenging terrains, he said.
“To haul supplies, it must be able to carry a certain weight, or mass, at a certain time, or speed,” Gart said. The formula can approximate the amount of power that vehicle will need, researchers said.
“The Army must develop feasible yet ambitious targets for tradeoffs among the power, speed, and mass of future terrestrial robots,” Kott said. “It is undesirable to base such targets on current experience, because military hardware is often developed and used for multiple years and even decades.”
“Therefore, the specifiers and designers of such hardware must base their targets—competitive yet achievable—on future technological opportunities not necessarily fully understood at the time of design,” he said.
The formula developed in this paper gives such a target and could enable the Army to make predictions of future performance of ground platforms such as legged robots given design constraints like vehicle and motor weight and desired speed, said Kott.
Article topics
Email Sign Up


Related Mobile Robots News












