Location: Rochester, NY
Size: 60,000 square feet plus a 19,000-square-foot mezzanine
Products: Pharmaceuticals and overthe-counter drugs
Throughput: 15,000 lines per night
Shifts per day/ Days per week: 2 shifts per day/6 days per week
Employees: 45
Read the full RDC Systems Report here.
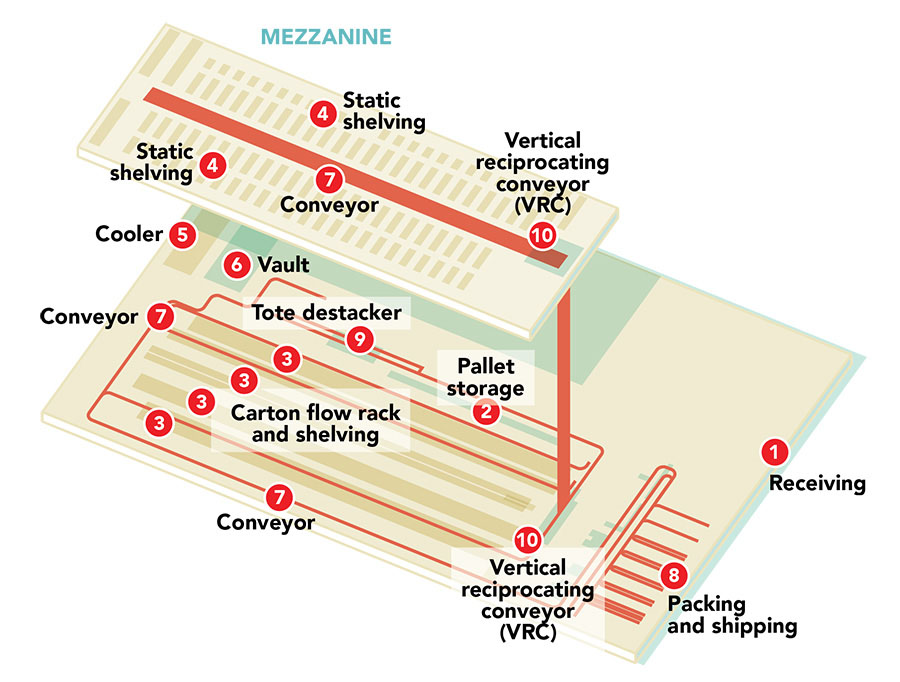
In its Rochester, N.Y., distribution center, a mobile piece-picking robot augments voice-directed picking operations on a mezzanine dedicated to slow-moving products, while faster-movers are picked from shelves and pallets on the ground floor.
Receiving
Receiving (1) takes place during the day shift. The facility receives mixed cases—never full cases—along with cases, split cases and some each deliveries. All incoming deliveries are scanned against a purchase order already in the system.
Storage
Putaway into storage is system directed. The facility has a small area for pallet storage (2). The rest of the inventory is stored at the case or item level in carton flow rack and shelving (3) on the floor level and on static shelving on the mezzanine level (4). Temperature sensitive items are stored in a small cooler (5) while restricted prescription drugs, such as narcotics, are stored in a secured vault (6). Pallets ready for storage, or pallets built in receiving, are delivered to a pallet storage location (2), where the putaway is confirmed either by a bar code scan or by voice. Carton or individual items such as canes, wheelchairs and walkers receive a license plate bar code label and may be placed on a put away cart and delivered to a storage location (3,4,5,6). Slow-moving items are transported to the mezzanine level (4) on a vertical reciprocating conveyor (10).
Picking
There are several distinct picking processes in the facility.
- Full case picking: Order selectors identify the number of cases they are going to pick on a desktop computer screen and the system prints out shipping labels. They are then directed by voice to picking locations in the pallet storage area (2) based on the most efficient path to pick those cases. Cases are picked to a cart or to a pallet on a walkie and the shipping label is applied. They’re then inducted onto a conveyor (7) and sorted to a shipping location in the packing and shipping area (8) based on the route.
- Pick to returnable tote: Returnable totes that are sent to individual stores may receive inventory from different pick zones located in the facility. The process is initiated on the floor level when a tote is inducted from a tote destacker (9) onto the conveyor (7). When the conveyor (7) delivers a tote into one of the floor level pick zones (3), an associate scans the tote, the voice system speaks a code that identifies the storage location for the next tote and the quantity. Once the associate has confirmed all of the picks in that zone, the tote is pushed back on the conveyor (7) and travels to the next pick location (3) on the floor level, where the process is repeated. Once all of the items for that tote have been picked on the ground level, the VRC (10) lifts the tote to the mezzanine level (4), where slow-moving items are stored on static shelves, along with items for which there was no available space on the floor. Order selectors follow a similar process on the mezzanine level. When a tote arrives in their zone, they scan a label and are directed to picking locations, where they pick to a handheld container that is then emptied into the shipping tote. The tote is then inducted back onto the conveyor. It is then routed to the shipping and packing area (8).
- Mobile robotic piece picking also takes place on the mezzanine level (4). For now, the process mimics picking by order selectors. When a shipping tote arrives, a robot operator scans the tote. Order information is then delivered to the mobile robot. The robot travels to a pick location and automatically picks the item from a shelf to an onboard container. If another pick is required, the robot is directed to the next location and repeats the process until it has picked all of the required items in its zone. It then returns to the robot operator, who empties the contents of the tote into the shipping tote and inducts it onto the mezzanine conveyor. It is then routed to the packing and shipping area (8). The operator then scans the next tote in the zone, and the process begins again.
Shipping
In shipping (8), customer orders are grouped into waves, palletized and loaded onto a truck for delivery to a courier destination. The courier breaks the orders down into last-mile deliveries to individual customers.
System Suppliers:
- Mobile Piece-Picking Robot: IAM Robotics
- Conveyor: Hytrol and SSI Schaefer
- Vertical Reciprocating Coneyor: PFlow Industries
- Voice Recognition System: Lucas Systems
- Mobile Computing & Bar Code Scanning: Zebra Technologies
- WMS: Developed in-house
- WCS: SSI Schaefer
- Returnable Shipping Totes: Monoflo International
- Inline Printing: Konica Minolta
- Print & Apply Shipping Labels: Weber Packaging
- Lift Trucks: Toyota
- Rack: Ridg-U-Rak
About the Author
Follow Robotics 24/7 on Linkedin
Article topics
Email Sign Up


Latest Robotics News












