Autonomous mobile robots interoperability is an increasing concern for AMR providers and users. InOrbit Inc. today announced that its InOrbit Platform for cloud-based robot operations is fully compatible with robots that implement the new MassRobotics AMR Interoperability Standard. The standard enables different robots to share information about their speed, location, direction, status, tasking/availability, and other performance characteristics.
“At InOrbit, our mission is to maximize the potential of every robot through RobOps best practices and technology,” stated Florian Pestoni, co-founder and CEO. “Third-party logistics, parcel delivery, and warehouse operators need to orchestrate robots performing different tasks, and interoperability across robot vendors is one piece of that puzzle. Now customers can connect any compatible robot to the InOrbit cloud.”
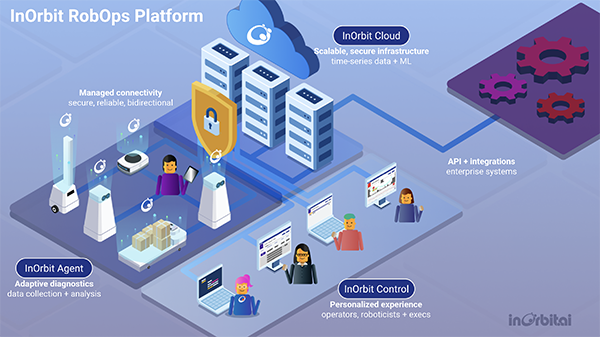
Mountain View, Calif.-based InOrbit said its robot-agnostic management platform can enable robotics suppliers and operators to develop, deploy, and orchestrate AMRs at global scale. The company said its multi-cloud platform provides secure real-time analytics and data collection, robot performance monitoring, incident management, and remote interventions.
“MassRobotics released this standard to help move the industry to the next level and we welcome different implementations and uses of the standard that can facilitate successful robotics implementations,” said Joyce Sidopoulos, co-founder and vice president of MassRobotics.
MassRobotics is a Boston-based organization dedicated to helping the Massachusetts robotics ecosystem grow. It provides facilities, networking, and startup support.
InOrbit, MassRobotics lead interoperability efforts
“There's no question that the robotics industry as a whole will benefit from increased collaboration,” Pestoni told Robotics 24/7. “InOrbit helps companies orchestrate any robot through the cloud to optimize fleet operations, whether you have a handful of a single type of robot or hundreds across multiple sites, functions, and vendors. We are glad to be contributing to the MassRobotics AMR Interoperability Standard and making it easier for robotics companies to support the standard.”
Pestoni is also a founding member of the Robot Operations Group, a community of industry experts dedicated to advancing robot operations, or RobOps, best practices.
InOrbit has joined MassRobotics as a member and has already contributed to the standard, which is available as an open-source project. The company has also released open-source components to help other companies become standards-compliant. It added that it is working on support for additional interoperability standards such as VDA-5050, which is intended to make connecting robots to the cloud easier.
Any compliant robot can connect to InOrbit for fleet-wide visibility and management, offering companies deploying robots the ability to orchestrate the work of large numbers of AMRs regardless of robot vendor, said the company.
InOrbit applies new protocol
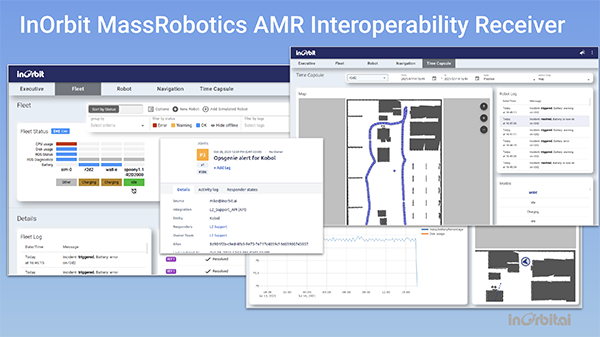
Besides making contributions to the MassRobotics AMR Interoperability Standard, InOrbit has implemented the ability to connect robots that support the MassRobotics-AMR-Sender protocol to its cloud platform without needing to install any additional software on the robots.
This allows manufacturers and adopters of compliant AMRs to benefit from RobOps best practices, including conducting operational monitoring of a diverse fleet within minutes, tracking robots' health and incidents in real time, using integration with incident management platforms, and understanding behavior with the recently released Time Capsule capability.
In addition, InOrbit has released an open source, configuration-based ROS 2 package for sending MassRobotics AMR Interop Standard messages to compliant receivers. Developers can now make robots compatible with the latest version of the Robot Operating System and connect to any MassRobotics AMR Interop receiver, including but not limited to InOrbit, using publicly available packages and a custom configuration file.
“These efforts to advance open source and interoperability across robots are a key part of the company’s vision to drive radical productivity improvements to enable humans to reach new heights,” said InOrbit.
The open-source project code for the MassRobotics interoperability standard is available: https://github.com/
About the Author
Follow Robotics 24/7 on Linkedin
Article topics
Email Sign Up

Related Interoperability News





Related Companies
Related Resources








