As the open-source community has continued building on the Robot Operating System or ROS, it has also received support from major software vendors. Last month, Amazon Web Services Inc. announced support for ROS 2 Foxy Fitzroy, the latest long-term support release for ROS 2, as well as the Gazebo 11 simulation engine and the Ubuntu 20.04 (Focal Fossa) operating system.
Seattle-based Amazon Web Services (AWS) said that “ROS 2 Foxy is the most secure and reliable ROS distribution to date for production robotics application development.” While AWS RoboMaker no longer supports ROS Kinetic, its support of ROS 2 Foxy Fitzroy for simulation and development does include Navigation2 (Nav2).
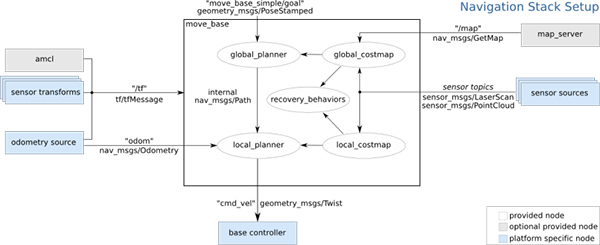
Nav2 “is the second generation of the ROS Navigation software stack, enabling robots to move autonomously from Point A to B,” wrote Matthew Hansen, principal solutions architect at AWS Robotics, in a blog post last week. “Nav2 includes new features not previously available in ROS that help developers improve the performance of their robot’s navigation and enables new robotics use cases within logistics, hospitals, or security.”
Hansen answered the following questions from Robotics 24/7 about AWS RoboMaker and Nav2 support for ROS 2 Foxy:
Can you briefly describe the new features in ROS 2 that Nav2 takes advantage of?
Hansen: First, Nav2 is based on lifecycle nodes that are new to ROS 2. Lifecycle nodes enable a more controlled startup and shutdown of your robot software system.
Nav2 also utilizes the ability to write launch files in Python. Before, launch files were only available in XML. Writing launch files in Python provides more functionality and better modularity, a combination which enables simplification and reuse by robotics developers.
How long would it take to build robotics applications in ROS before compared with Foxy?
Hansen: Foxy provides a high bar for features, tools, and quality that has been previously hard to achieve without a large engineering effort. Using Foxy as a starting point gives developers a big head start over starting from scratch, saving development and testing time.
Depending on the application, from a home cleaning robot to a lunar rover, the amount of time savings varies.
Were features such as the regulated pure pursuit controller, waypoint follower, and keepout zones included with commercial applications like delivery robots in mind? Have AWS RoboMaker customers been demanding such features?
Hansen: Yes, especially the waypoint following and keepout zone features. Both were added with commercial robots in mind.
Previously, some customers have implemented these features themselves—now, this built-in capability saves them effort and raises the baseline for them to build on.
What are the advantages of using Nav2 simulation with AWS RoboMaker?
Hansen: Simulation in AWS RoboMaker enables developers to test their software to a high degree of confidence without requiring access to a physical robot. In a new product, this can save time because prototype hardware may be limited and needed for validating the physical properties of the robot like motors, wheels, and sensors.
In addition, by starting with Nav2, developers can start with an already robust navigation system and spend their time focusing on any more advanced features for their use case.
Of the steps you described for using Nav2 in RoboMaker, are there any that might be tricky for people to follow?
Hansen: All the steps needed to use the plugins are not detailed in the blog, but I referenced the tutorials for both the SmacPlanner and the Regulated Pure Pursuit controller.
The steps are actually fairly simple, and only require modifying the existing parameters file to match the values in the tutorials. Links to the tutorials are included in middle section of the blog.
What are the implications for the college campus or bookstore demonstration of Nav2 on two robots for other use cases?
Hansen: The college campus demonstration was a real-world test where the two robots needed to avoid humans in real time while navigating a large indoor campus. That demo was meant to show the high degree of autonomy and reliability that is provided by Nav2.
The bookstore simulation is meant as a demonstration of a security robot or similar use case. Together, they are meant to show that Nav2 is highly adaptable and can be used for many purposes in the real world.
How active has the user community been for AWS RoboMaker, and what do you expect the response to be for Nav2 support?
Hansen: We have an increasing number of developers embracing robot simulation as a key to rapid robotics development. We expect that the user community growth will accelerate with ROS 2 Foxy and believe Nav2 will be a key driver for that growth.
We’ve heard many customers comment that they’re looking strongly at using Nav2 as a starting point for their robotics projects going forward, replacing their custom software.
About the Author
Follow Robotics 24/7 on Linkedin
Article topics
Email Sign Up


Related ROS News