Found in Robotics News & Content, with a score of 2.25
November 13, 2024
…Iagnemma directed the Robotic Mobility Group research laboratory at MIT, where he authored publications related to robotics and AI that have been cited more than 20,000 times. Iagnemma is also an inventor with more than 50 issued or pending patents in robotics and autonomous vehicles. “We are excited to see a skilled technologist and experienced leader like Karl take the helm at Vecna Robotics, guiding the company into its next chapter and further strengthening its leadership in the material handling robotics sector,” said Griffin Schroeder, Partner at investment firm Tiger Global. Angel investment made to Vecna by Iagnemma in 2020…
Found in Robotics News & Content, with a score of 0.41
June 30, 2024
…and a Ph.D. in computer science and AI from MIT. Her publications cover a wide range of topics, including distributed robotics, machine learning, human-robot interaction, and socially assistive robotics, and are highly cited. Matarić is a member of the American Academy of Arts and Sciences (AMACAD), and Fellow of the American Association for the Advancement of Science (AAAS), the Association for the Advancement of Artificial Intelligence (AAAI), Institute of Electrical and Electronics Engineers (IEEE) and ACM, and recipient of the United States Presidential Award for Excellence in Science, Math, and Engineering Mentoring. Matarić is the founding director of the USC…
Found in Robotics News & Content, with a score of 1.39
May 05, 2024
…Costy, president and managing director of Siemens Digital Industries Daniela Rus, professor of electrical engineering and computer science at MIT Wendy Tan White, CEO of Intrinsic, an Alphabet Company Following along with Robotics 24/7 for all the news from Automate 2024 in Chicago.
Found in Robotics News & Content, with a score of 0.70
November 22, 2023
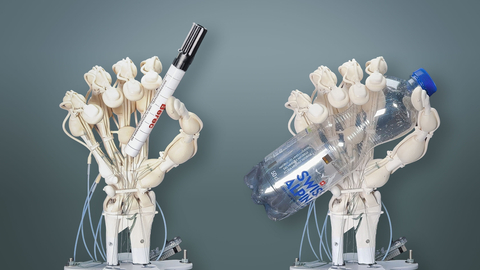
…print, without assembly of subcomponents. Written in collaboration with MIT and the Soft Robotics Lab at ETH Zurich, the paper, titled “Vision-Controlled Jetting for Composite Systems and Robots,” demonstrates how VCJ opens a new frontier in manufacturing by expanding capabilities to synthetically recreate the intricate structure and functionality of natural organisms. Traditional manufacturing methods struggle to fabricate systems that mirror the intricate structures and varied material properties found in nature. VCJ rises to this challenge, offering the ability to accurately fabricate complex, multi-functional systems in a single print without the need to assemble subcomponents. “Our VCJ technology is a qualitative…
Found in Robotics News & Content, with a score of 0.64
October 30, 2023
…via Scene-Level Diffusion.” NVIDIA Jetson Orin supports Woods Hole, MIT robot development “Researchers are taking deep learning for a deep dive, literally,” said Scott Martin, senior writer at NVIDIA, in a blog post. The Woods Hole Oceanographic Institution (WHOI) Autonomous Robotics and Perception Laboratory (WARPLab) and the Massachusetts Institute of Technology are developing a robot to study coral reefs and their ecosystems. Some 25% of coral reefs worldwide have vanished in the past three decades, and most of the remaining reefs are heading for extinction, according to the WHOI Reef Solutions Initiative. The new WARPLab autonomous underwater vehicle (AUV) is…
Found in Robotics News & Content, with a score of 0.80
September 26, 2023
…ethics, and policy and joins the Institute from the MIT Media Lab. She said her work there over the past decade has focused on anticipating difficult questions that lawmakers, engineers, and the wider public need to address. With a background in law and economics, Darling is a former fellow at the Harvard Berkman Klein Center for Internet & Society and the Yale Information Society Project. She is also an affiliate at the Institute for Ethics and Emerging Technologies. The AI Institute said Darling’s team will explore immediate as well as long-term questions on the implementation and use of robots, their…
Found in Robotics News & Content, with a score of 0.38
September 24, 2023
…Robots), the Advanced Robotics for Manufacturing (ARM) Institute, and MIT Lincoln Lab. Other sponsors included 6K, Synagex, Quabbin Wire & Cable, Tooling U-SME, GBMP, Equinor, the Massachusetts Manufacturing Energy Collaborative, Skylitics, Hybrid CNC Parts, Spark Photonics, Mack Prototype, AB Corp, MRSI Myronic, Modern Mold and Tool, MassDevelopment, Massachusetts Life Sciences Center, and Associated Industries of Massachusetts. Organizing partners for the event included CAM, the Massachusetts Manufacturing Extension Partnership (MassMEP), FORGE, Worcester Polytechnic Institute (WPI), MassHire, and MassRobotics. The third annual Massachusetts Manufacturing Mash-Up included networking and educational opportunities. Source: CAM Mash-Up includes student activities This year's Massachusetts Manufacturing Mash-Up activities…
Found in Robotics News & Content, with a score of 0.25
September 06, 2023
…illness, some health professionals are still not convinced. At MIT, professor and psychologist Sherry Turkle said she worried that the interactions of machines “push us along a road where we’re encouraged to forget what makes people special.” “The performance of empathy is not empathy,” Turkle said. “The area of companion, lover therapist, best friend is really one of the few areas where people need people.” About the author Oliver Mitchell is a partner at ff Venture Capital. His areas of focus are drones, robotics, and applied AI. Mitchell is also an adjunct professor at Yeshiva University. This column is reposted…
Found in Robotics News & Content, with a score of 0.32
September 03, 2023
…recent years from the likes of both OpenAI and MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL). While the former is better known today for ChatGPT, in 2018, it made headlines by training a human-like robot hand to manipulate physical objects with unprecedented dexterity by using a reinforcement learning algorithm and code. CSAIL also relied on advances in deep learning to reorient a robotic hand to handle over 2,000 objects. As the pace of AI innovation continues to accelerate, we’re not far from seeing deep learning models for robotic dexterity deployed in real-world assembly lines. Giving robots awareness of their…
Found in Robotics News & Content, with a score of 2.94
August 27, 2023
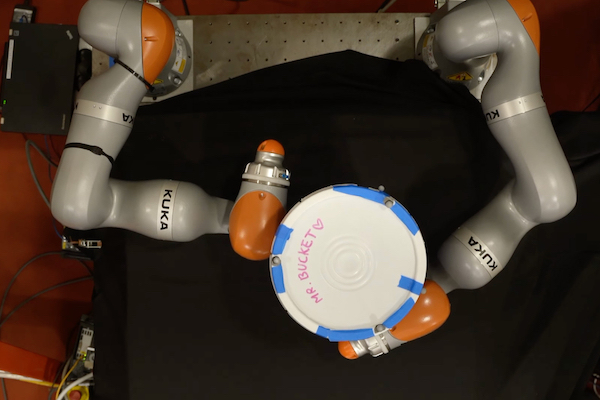
…contact events, planning for this task quickly becomes intractable. MIT researchers said they have found a way to simplify this process, known as contact-rich manipulation planning. They use an artificial intelligence technique called smoothing. It summarizes many contact events into a smaller number of decisions, to enable even a simple algorithm to quickly identify an effective manipulation plan for the robot. Manipulation planning promises new robotics applications While still in its early days, this method could potentially enable factories to use smaller, mobile robots that can manipulate objects with their entire arms or bodies, rather than large robotic arms that…
Found in Robotics News & Content, with a score of 0.24
August 25, 2023
…team: Dexai Robotics (principal investigator), Massachusetts Institute of Technology (MIT) Topic areas addressed: Automated robotic task planning Description: Fixed manipulators perform tasks that require speed and correctness. As the restaurant industry struggles to return to pre-pandemic levels and continues to navigate workforce shortages, robotics can help to fill the gap. This project will build upon Dexai Robotics’ existing product by doubling improvement on ingredient pickup robot moving time, improving the planning time for utensil pickup, and improving on meal throughput. While the use case is focused on the food industry, the deliverables from this project could benefit the broader robotics…
Found in Robotics News & Content, with a score of 2.44
July 30, 2023
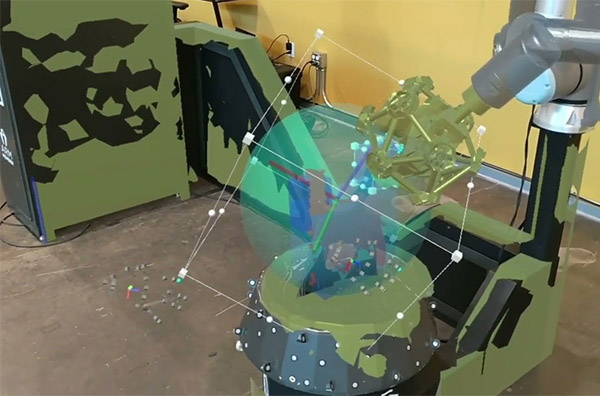
…enhance the problem-solving capabilities of household robots. Researchers at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) are using machine learning to cut down on the typical iterative process of task planning that considers all possible actions. PIGINet eliminates task plans that can’t satisfy collision-free requirements, and it reduces planning time by 50% to 80% when trained on only 300 to 500 problems. Typically, robots attempt various task plans and iteratively refine their moves until they find a feasible solution, which can be inefficient and time-consuming, especially when there are movable and articulated obstacles. Maybe after cooking, for example, you…