Found in Robotics News & Content, with a score of 13.06
May 06, 2021
…Intelligence Laboratory at the Massachusetts Institute of Technology (MIT CSAIL). In addition, Xiao was an assistant professor at Princeton University and the founding director of the Princeton Computer Vision and Robotics Labs from 2013 to 2016. Shenzhen pioneers RoboTaxi testing in China AutoX's fully driverless RoboTaxi service has been “well received” by Shenzhen residents and officials alike, according to Ms. Wang, a representative of the company's operations team. Within the first 100 days of operation, AutoX RoboTaxi has won loyal users from the traditional ride-hailing market, she said. AutoX is the second permit holder for California Department of Motor Vehicle’s…
Found in Robotics News & Content, with a score of 12.78
March 17, 2022
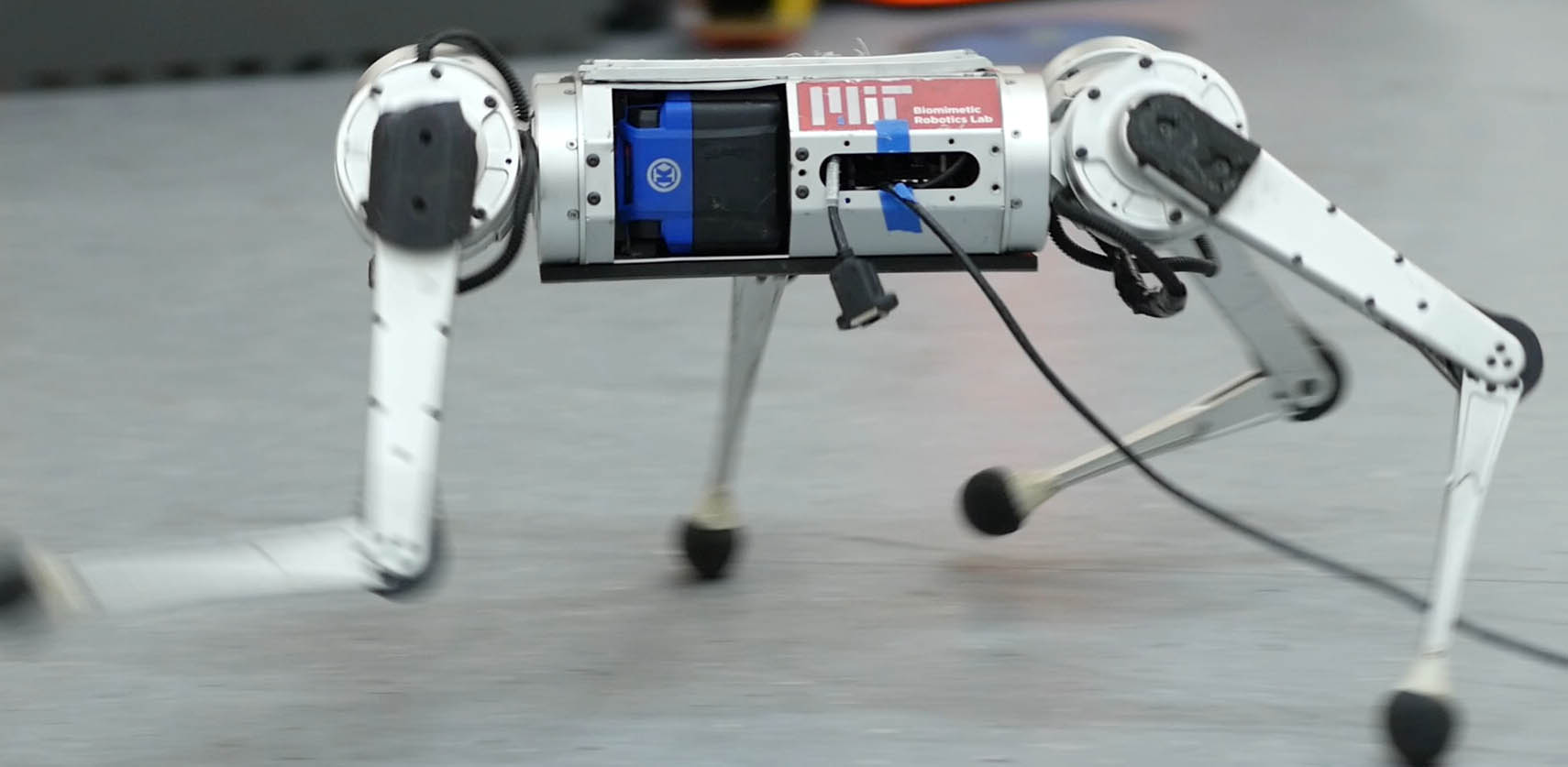
…student at MIT Computer Science and Artificial Intelligence Laboratory (CSAIL), and Ge Yang, a postdoctoral fellow at the Institute of AI and Fundamental Interactions (IAIFI), about just how fast the quadruped robot can run. Q: We’ve seen videos of robots running before—why is running harder than walking? Achieving fast running requires pushing the hardware to its limits, for example by operating near the maximum torque output of motors. In such conditions, the robot dynamics are hard to analytically model. The robot needs to respond quickly to changes in the environment, such as the moment it encounters ice while running on…
Found in Robotics News & Content, with a score of 10.99
March 04, 2022
…Group of MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) and lead author of the paper. This is particularly true in the manufacturing and health care industries. “Whether or not we try to help people build conceptual models of robots, they will build them anyway,” she said. “And those conceptual models could be wrong. This can put people in serious danger. It is important that we use everything we can to give that person the best mental model they can build.” Theoretical approaches should be deliberate While many research papers incorporated partial elements of one theory, this was most likely…
Found in Robotics News & Content, with a score of 9.63
August 27, 2023
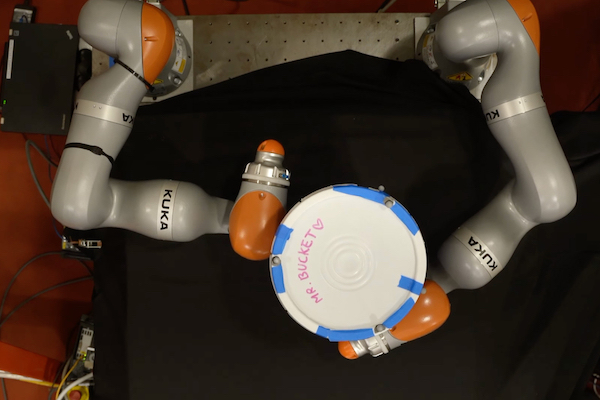
…member of MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) In these figures, a simulated robot performs three contact-rich manipulation tasks: in-hand manipulation of a ball, picking up a plate, and manipulating a pen into a specific orientation. Source: MIT, courtesy of the researchers Reinforcement learning versus smoothing Reinforcement learning is a machine learning technique where an agent, like a robot, learns to complete a task through trial and error with a reward for getting closer to a goal. The researchers said this type of learning takes a black-box approach because the system must learn everything about the world through…